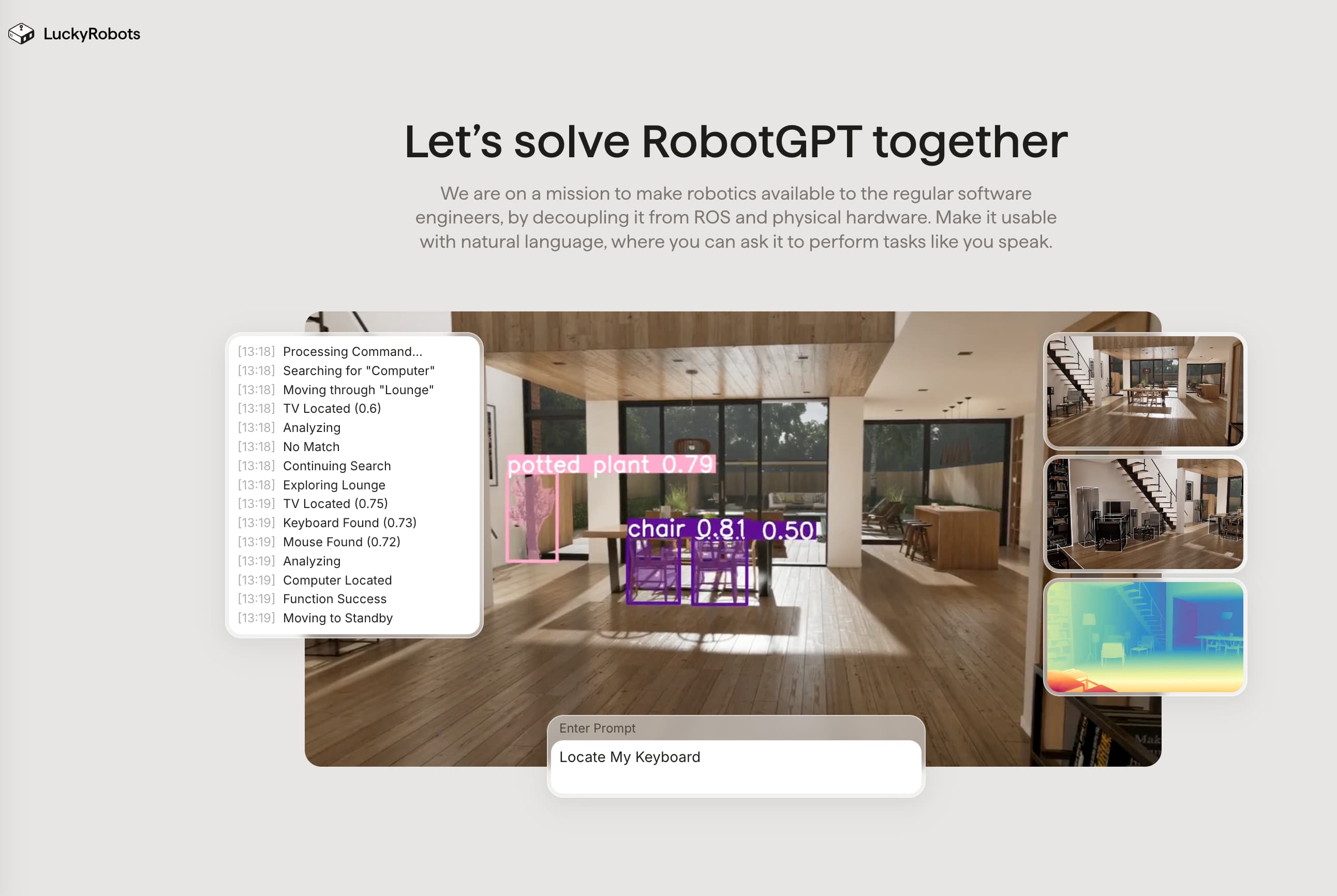
LuckyRobots是一个致力于使机器人技术对普通软件工程师可用的模拟平台,通过自然语言控制机器人执行任务,无需依赖ROS和物理硬件。平台提供了虚拟环境、物理模拟和多摄像头输入,支持用户部署和测试端到端的AI模型。
需求人群:
"目标受众为对机器人编程和AI模型部署感兴趣的软件工程师和研究人员。该平台通过简化的安装过程和自然语言控制,降低了进入门槛,使非专业用户也能参与到机器人技术的学习和应用中。"
使用场景示例:
软件工程师使用LuckyRobots模拟平台训练AI模型以控制家庭服务机器人。
研究人员利用平台的物理模拟功能测试机器人在不同环境下的性能。
教育工作者使用LuckyRobots进行教学,向学生展示机器人技术和AI的结合应用。
产品特色:
支持自然语言命令,使机器人响应自然语言任务指令。
提供虚拟环境,如家庭、办公室等,用于机器人导航训练。
模拟真实物理条件,如重力,以测试机器人模型。
提供四个5 FPS的摄像头输入,包括两个RGB摄像头和两个深度摄像头。
支持模拟真实机器人和想象中的机器人,如可以飞行的无人机。
提供基础工具,用户可以探索、构建自己的AI模型。
使用教程:
1. 访问LuckyRobots官网并注册账户。
2. 安装平台所需的软件包,例如通过命令'pip install luckyrobots'。
3. 阅读文档了解平台的工作原理和技术规格。
4. 加入Discord社区或访问Github获取更多信息和支持。
5. 在模拟环境中部署AI模型,输入自然语言命令进行测试。
6. 根据反馈调整模型参数,优化机器人的性能。
7. 参与社区讨论,分享经验和获取新的想法。
浏览量:78
通过自然语言控制机器人的模拟平台。
LuckyRobots是一个致力于使机器人技术对普通软件工程师可用的模拟平台,通过自然语言控制机器人执行任务,无需依赖ROS和物理硬件。平台提供了虚拟环境、物理模拟和多摄像头输入,支持用户部署和测试端到端的AI模型。
为AI聊天机器人添加自然语言的语音合成功能
Summme是一个插件,为您喜欢的AI聊天机器人添加自然语言的语音合成功能。它支持ChatGPT、Bard、Bing Chat、Claude.ai等多个聊天机器人平台。您可以自动或手动将聊天机器人的回复转换为语音,享受更加自然的语音交流体验。Summme提供多种语音音调和语言选择,支持调节语速,还可以根据您的名字进行个性化问候。完全免费且无需注册。尝试Summme,为您的聊天机器人增添声音。
智能AI聊天助手,提供多语言对话和个性化服务。
Ai Chat机器人Plus是一款基于人工智能技术的聊天机器人,它能够理解并流畅地与用户进行交流,提供信息查询、日常咨询、技术支持等服务。这款产品通过模仿人类的对话方式,为用户提供了一个直观、便捷的交互体验。它主要的优点包括快速响应、高准确率的语义理解以及个性化的服务体验。Ai Chat机器人Plus适用于需要快速、智能对话解决方案的个人和企业用户。
Helix 是一款用于通用人形机器人控制的视觉-语言-行动模型。
Helix 是一款创新的视觉-语言-行动模型,专为人形机器人的通用控制而设计。它通过将视觉感知、语言理解和动作控制相结合,解决了机器人在复杂环境中的多项长期挑战。Helix 的主要优点包括强大的泛化能力、高效的数据利用以及无需任务特定微调的单一神经网络架构。该模型旨在为家庭环境中的机器人提供即时行为生成能力,使其能够处理从未见过的物品。Helix 的出现标志着机器人技术在适应日常生活场景方面迈出了重要一步。
基于多模态大型语言模型的Discord机器人
PigPig是一个基于多模态大型语言模型(LLM)的Discord机器人,旨在通过自然语言与用户互动。它结合了先进的AI能力和实用功能,为Discord社区提供丰富的体验。
快速构建自然语言处理应用
GradientJ是一个用于测试、部署和管理自然语言处理应用的平台。它基于大型语言模型如GPT-4,提供快速构建NLP应用的能力。用户可以使用GradientJ开发自定义的文本生成、问答系统、聊天机器人等NLP应用。GradientJ提供简单易用的接口和工具,让开发者能够快速上手并实现自己的用例。定价方案灵活,适合个人开发者和企业用户。
AI国际象棋机器人,智能对弈与教学
元萝卜AI下棋机器人是商汤科技旗下家用机器人品牌,通过AI科技为孩子的健康、学习、快乐成长保驾护航。产品具备陪练涨棋、棋力闯关、巅峰对决、在线对弈、残局挑战、AI打谱、AI习题精练、棋局分享等功能,旨在通过真实棋盘棋子的交互,保护孩子视力,同时提高棋艺水平。
Unshackled AI是一款AI聊天产品,提供强大的自然语言处理功能。
Unshackled AI是一款基于人工智能技术的聊天产品,主要优点是提供准确的自然语言处理,有助于用户快速解决问题。产品定位为帮助用户高效沟通,不收取费用。
构建高效对话式聊天机器人
Enrol聊天机器人是您的在线销售专家,能够将网站访问者转化为付费客户。它拥有简单的拖放界面,支持通过API与后端系统集成,可以通过网页、Facebook Messenger以及Telegram进行全方位沟通,实现24小时不间断的客户服务、销售渠道构建,大大节省人力成本。
AI自然语言处理模型
Powerups AI是一款基于人工智能技术的自然语言处理模型,具有极高的语言理解和生成能力。该模型可以用于文本生成、语言翻译、对话生成等多个领域,可以帮助用户快速生成高质量的文本内容,提高工作效率。
开放式机器人整合框架,实现家居物品搬运。
OK-Robot是一个开放的模块化框架,实现了在任意家居环境下根据语言指令进行零样本物品搬运任务。该框架采用了模块化设计,使用3D VoxelMap进行开放词汇的导航,AnyGrasp和LangSam进行开放词汇的抓取,以及放置原语进行物品放置。框架不需要预先训练,可以实现语言指令的零样本泛化。
聊天机器人,让你不再孤单
豆包是一款智能聊天机器人,能够与用户进行自然语言交互,提供各种聊天话题,包括天气、新闻、笑话、音乐等。豆包还能够根据用户的喜好和习惯,推荐相关的内容和服务。豆包是你的私人聊天助手,让你不再孤单。
数据驱动聊天机器人,提升效率
AnswerFlow AI是一款数据驱动的聊天机器人,利用自然语言处理技术和数据分析来提供更好的洞察和自动化。它能够连接数据源并根据您的数据训练定制的ChatGPT机器人,实现无代码构建、无限量定制和高效的对话交互。
一款基于人工智能的聊天机器人
Faltah 是一款基于自然语言处理技术的聊天机器人产品。它可以进行自然的闲聊,回答各类问题,获取实时信息,提供娱乐服务等。核心优势是可交流的语言数量多,回答质量高,支持多种使用场景,且不断迭代升级。适合个人及企业客户使用。
聊天机器人开发平台
ChatDev是一个聊天机器人开发平台软件开发平台,可以帮助用户快速构建自己的聊天机器人。ChatDev提供了丰富的功能和工具,包括自然语言处理、多语言支持、API集成等,帮助用户轻松实现聊天机器人的开发。ChatDev的定价灵活,提供免费试用和付费套餐,适合个人和企业用户使用。
创建和使用自定义聊天机器人,基于HuggingFace的开源模型。
HuggingChat Assistants是HuggingFace发布的聊天机器人定制平台。用户可以选择HuggingFace托管的多个开源模型,创建自定义的聊天机器人,适用于多个领域。
自然语言处理模型
LLaMA Pro 是一种用于大规模自然语言处理的模型。通过使用 Transformer 模块的扩展,该模型可以在不遗忘旧知识的情况下,高效而有效地利用新语料库来提升模型的知识。LLaMA Pro 具有出色的性能,在通用任务、编程和数学方面都表现出色。它是基于 LLaMA2-7B 进行初始化的通用模型。LLaMA Pro 和其指导类模型(LLaMA Pro-Instruct)在各种基准测试中均取得了先进的性能,展示了在智能代理中进行推理和处理各种任务的巨大潜力。该模型为将自然语言和编程语言进行整合提供了宝贵的见解,为在各种环境中有效运作的先进语言代理的开发奠定了坚实的基础。
与文档进行自然语言对话的Python应用
Chat With Your Docs 是一个Python应用程序,允许用户与多种文档格式(如PDF、网页和YouTube视频)进行对话。用户可以使用自然语言提问,应用程序将基于文档内容提供相关回答。该应用利用语言模型生成准确答案。请注意,应用仅回应与加载的文档相关的问题。
开源自然语言生成模型
OLMo是一个开源的自然语言生成模型,由Allen AI研究所开发,基于Transformer架构,可用于生成高质量的英文文本。它具有生成长度可达4096个token的长文本的能力。OLMo-7B是目前公开的参数量最大的开源英文语言模型之一,拥有69亿参数,在多个英文NLP任务上的表现优于同类模型。它可用于文本生成、任务导向的微调等多种自然语言处理任务。
基于GPT-4的拟人机器人
Alter3是一个基于GPT-4的拟人机器人,能够通过自然语言指令生成各种人类动作,实现零次学习。它具有43个关节自由度,可以自由运动,同时结合面部表情识别和生成,实现复杂的交互。用户只需要提供语言指令,Alter3就可以自主调整代码,生成相应运动,无需人工迭代调整。还可以通过语言反馈来优化动作,形成运动记忆。这种结合语言理解和身体运动的系统,大大提升了人机交互的潜力。
5分钟内训练AI聊天机器人
Happyml是基于最新的人工智能语言模型构建的,能够在5分钟内训练并部署。只需连接所有API、文件和网站,即可部署到Slack、Shopify等平台。免费加入,无需信用卡。
Figure是第一家专注于研发通用型人形机器人的AI机器人公司。
Figure是一个创新的AI机器人公司,致力于研发第一台通用型人形机器人Figure 01。Figure 01集成了人形的灵巧性和前沿的AI技术,可广泛应用于制造业、物流、仓储和零售等领域,支持人类完成更多工作。该机器人高5.6英尺,载重20公斤,重60公斤,工作时间5小时,移动速度每秒1.2米。Figure还拥有世界顶级的机器人团队,团队成员在AI和人形机器人领域拥有超过100年的丰富经验。
使用大型语言模型生成机器人模拟任务
GenSim利用大型语言模型生成大量的机器人模拟任务,支持目标导向生成和探索性生成两种模式,可用于多任务策略训练和任务级别泛化。使用GPT4扩展了现有基准测试10倍以上,支持超过100个任务,通过有监督微调和评估多个LLM,包括微调的GPT和Code Llama,生成机器人模拟任务的代码。最小的模拟到真实世界的适应后,预训练在GPT4生成的模拟任务上的多任务策略在真实世界中展现了更强的转移能力,超过基线25%。
利用AI为网站内容提供交互式聊天机器人
SiteCompanion是一个可以帮助用户将网站内容转换成交互式AI聊天机器人的在线服务。它可以让用户轻松创建自定义的聊天机器人,通过自然语言交互来回答用户的问题,为用户提供即时的指导和帮助。
一个完全开源的大型语言模型,提供先进的自然语言处理能力。
MAP-NEO是一个完全开源的大型语言模型,它包括预训练数据、数据处理管道(Matrix)、预训练脚本和对齐代码。该模型从零开始训练,使用了4.5T的英文和中文token,展现出与LLaMA2 7B相当的性能。MAP-NEO在推理、数学和编码等具有挑战性的任务中表现出色,超越了同等规模的模型。为了研究目的,我们致力于实现LLM训练过程的完全透明度,因此我们全面发布了MAP-NEO,包括最终和中间检查点、自训练的分词器、预训练语料库以及高效稳定的优化预训练代码库。
多语言聊天机器人
Giti多语言聊天机器人是一款智能聊天机器人,支持100多种语言,具备自然流畅的对话能力。它可以理解您的母语并与您进行智能对话。无论您想聊天、咨询问题还是寻求娱乐,Giti都能为您提供准确、有趣的回答。

© 2026 AIbase 备案号:闽ICP备08105208号-14